Bootstrapping
What is it?
- Turning the computer on
- From pressing the power bottom to the screen loading
Storage
- Hardware stores this bootstrapping code into a small volatile (non-erasing) memory ROM
- This memory is only used to boot up the system
- Therefore it is safe to say that the memory is reserved for bootstrapping
Bootstrapping Code
- BIOS sets up RAM & I/O devices
- Scans buses to detect attached devices (whether the necessary I/o devices are not attached then it prompts and does not continue until they are)
- Determines boot device, boot device is the space where OS is found. So it finds that boot device where the OS is located and then it executes the OS from there
- The first section in the boot device that is executed is called the bootloader
Steps
- BIOS
- 1st Bootloader
- 2nd Bootloader (loads the OS)
Loading means moving 1st and 2nd bootloader into main memory
Startup
- Machine starts in the system mode, so the kernel code can execute immediately
- System mode is a mode that is only used for system start up
- System mode is the same as kernel node
OS Initialization
- Initialize internal data structures (PCB)
- Create first process (example shell in unix command line)
- Switch mode to user mode and start running the first process
- Wait for something to happen (curser blinking)
Memory Layout
- OS Heap
- Boot thread stack
- All other OS code
- Exception Vector Code
- Stack
- Heap
- Static Data
- Code
From Program to Process:
- Code file, source file “.c” -> converted to “.o” file
Suppose I import from math library in my “.c” file then that library file also gets converted into “.o” file
- All “.o” file -> becomes an executable binary file
- When this binary file gets executed it becomes a process. When does it get executed?
Unix Shells
- This code is used to execute a binary file
while(1) {
char *cmd = read_command();
int child_pid = fork()l
if (child_pid == 0) {
exec(cmd);
}
else {
wait(child_pid);
}
}
- Fork – starts a new process, copies a parent process into child process or creates 2 identical processes in the memory address
- Exec – picks up our created binary file and copies its code in to the child process’s text section, also places PCB into the ready queue
Communication between user & kernel mode
- Kernel and user mode communicate through system calls
Getting to kernel mode – How do we get to the kernel mode?
- Through system mode which is kernel mode
- Through commands such as printf & fopen which go to system calls
- Through hardware interrupts (pressing a key in hardware goes to OS which runs in kernel mode and the to the user mode)
- Software trap or execution (Ctrl + C uses software to stop program)
- To exit program we need to go through kernel mode
The System Calls Model
PICTURE
System Call Operations
- Kernel mode must verify arguments that are passed
- System calls can send arguments (eg printf(“…”))
- A fixed number of arguments can be passed into registers (kernel must copu data from user space into its own buffers)
- Result of system call is returned in register
- An argument is passed on as address to memory location containing the data to be used then it copied to kernel memory
Introduction to Synchronization
Cooperating Processes
- A process is independent if it cannot affect or be affect by other processes executing in the system
- Independent processes do not share data
- A process is cooperating if it’s not independent
- Cooperating process must be able to communicate with each other and to synchronize their action
Interprocess Communication
- Cooperating processes need to exchange information using either Shared Memory (fork) or Message Passing
- Message passing model is the one that we spoke out in the previous section Send(P, msg) – send msg to process P, Receive(Q, msg) – receive a msg from process Q
Motivating Example
Withdraw(acct, amt) {
balance = get_balance(acct);
balance = balance - amt;
put_balance(acct, balance)
return balance;
}
Deposit(acct,amt){
balance = get_balance(acct);
balance = balance + amt;
put_balance(acct, balance)
return balance;
}
- Suppose you share the account with your sister so at an ATM you’ve deposited and she withdrew at the same time. The only one process executes
- The problem is that execution of the two processes can be interleaved
Schedule A:
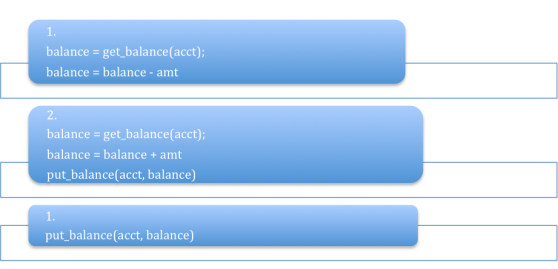
- Context switching occurs randomly at absolutely any time but our aim is that the execution of the next process should wait for the current one to computer or else shared memory can make errors
Schedule B:
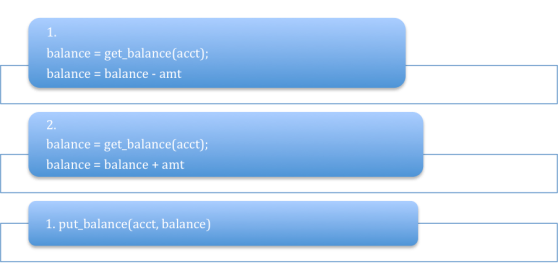
- If context switch occurs in this manner then we are able to do things as planned
- However there is no guarantee of how the context switch will occur so we need a solution
- Problem: Two concurrent threads manipulate a shared resource (the account) without any synchronization
- We need to ensure that only 1 thread at a time can manipulate the shared resource so we need synchronization
- Solution: Let only one thread access the shared resource at a time, this is called synchronization
- All other threads must wait for the completion of the first one
- When the thread leaves the shared memory/critical section only then the other thread may enter
On the side: What data is shared between threads?
- Shared: Global variables and static objects (stored in the static segment, accessible by any thread)
- Dynamic Objects and other heap objects (allocated from heap with malloc/free or new/del
- Not Shared: Local variables, each thread has its own local variables
Critical Section Problem
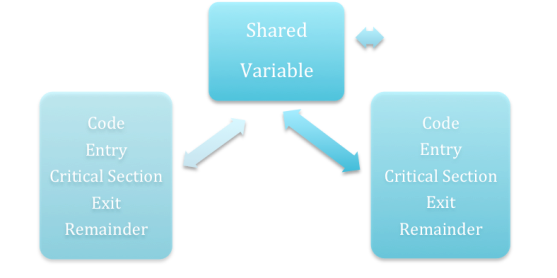
- Arrows indicate that Critical Section and Shared Variable can read and write each other
- Each thread must request permission to enter its CS in its entry section
- Critical Section may be followed by an exit section
- Remaining code is in the remainder section
We want:
- Mutual Exclusion
If one thread is in the CS, then no other is or can be
- Progress
If no thread is in the CS and some threads want to enter the CS, it should be able to enter in definite time (immediately)
- Bounded waiting
If some tread T is waiting on the CS, then there is a limit on the number of times other threads can enter CS before this thread is granted access. Don’t make it wait for too long
- Performance
The code of entry & exit should be small compared to code for executing the task in CS
2-Thread Solution
2-Thread Solution – First Try
My_work(id_t id) {
...
while (turn != id)
/* critical section, access protected resource */
turn = 1 - id
...
}
- Benefit: only one thread at a time can be in its Critical Section
- Drawback: If turn =0 then Ti may not enter even if T0 is in the code section
2-Thread Solution – Second Try
- The first attempt does not have enough info about the state of each process it only remembers which process is allowed to enter the CS
- Here each thread will have two flags, each thread may update its own flag and read the other threads flag
- If flag[i] is true then Ti is ready to enter its CS
My_work(id_t id) {
...
while (flag(1-id))
flad[id] = true;
/* critical section, access protected resource */
flag[id] = false
...
}
- Drawback: If both come to Critical Section at exactly the same time then both enter at the same time locking the system, this is called deadlock
2-Thread Solution – Third Try
- Combine the key idea of the 1st and second attempt for a correct solution
- The thread share the variables turn & flag (where flag is an array as before)
Enter_region(id_t id) {
flag[id] = true;
turn = id;
while (turn == id && flag[other] == true);
}
Leave_region(id_t id){
flag[id] = false;
}
- Basic Idea: if both try to enter at the same time, turn will be set to both 0 and 1 at roughly the same time. Only one assignment will last. The final value to turn decides who gets to go first
Peterson’s Algorithm – for achieving mutual exclusion
int turn;
int interested[N]
Enter_region(id_t id) {
int other;
other = 1 - process
interested[process] = TRUE;
turn = process;
while (turn == process && interested[other] == true);
}
Leave_region(int process){
interested[process] = False;
}
Higher level abstractions:
- Locks
Very primitive, minimal semantics
- Semaphores
Basic, easy to understand, hard to program with
- Monitors
High-level, ideally has language support (Java)
- Messages
Simple model for communication & synchronization direct application to distributed systems
Synchronized Hardware
- We need help from hardware in order to built these higher level abstractions
- On a uniprocessor – disable interrupts before entering the critical section, prevents context switches and doesn’t work on multiprocessor
- Need some special atomic instructions
Atomic Instructions
Test-and_Set Lock (TSL)
- Test and Set uses a lock variable, lock = 0 means nobody is using the lock and lock=1 means that lock is in use
- In order to acquire lock, must change its value from 0 to 1
- Lock is a memory address
- *lock is the value at the memory address of lock
boolean test_and_set(boolean *lock){
boolean old = *lock;
*lock= True;
return old;
}
- Hardware executes this atomically
- The semantics of test and set are:
- Record the old value of the variable
- Set the variable to some nonzero value
- Return the old value
- Lock is always true on exit in test and set
- Return value is either true if it was locked already or false f it was previously available
Atomic instructions means nobody can context switch this code that is running and effectively it is a single instruction called test and set lock
A lock implemented
void acquire(boolean *lock){
while (test_and_set(lock));
}
void release(boolean *lock){
*lock = false;
}
Withdraw and Deposit Example with locks
Withdraw(acct, amt) {
acquire(lock);
balance = get_balance(acct);
balance = balance - amt;
put_balance(acct, balance);
release(lock);
return balance;
}
Deposit(acct,amt){
acquire(lock);
balance = get_balance(acct);
balance = balance + amt;
put_balance(acct, balance);
release(lock);
return balance;
}
Possible Schedule
1.
acquire(lock);
balance = get_balance(acct);
balance= balance –amt
2.
acquire(lock)
1.
put_balance(acct,amt)
release(lock)
2.
balance= get_balance(acct)
balance = balance + amt
put_balance(acct, balance)
release(lock)
